





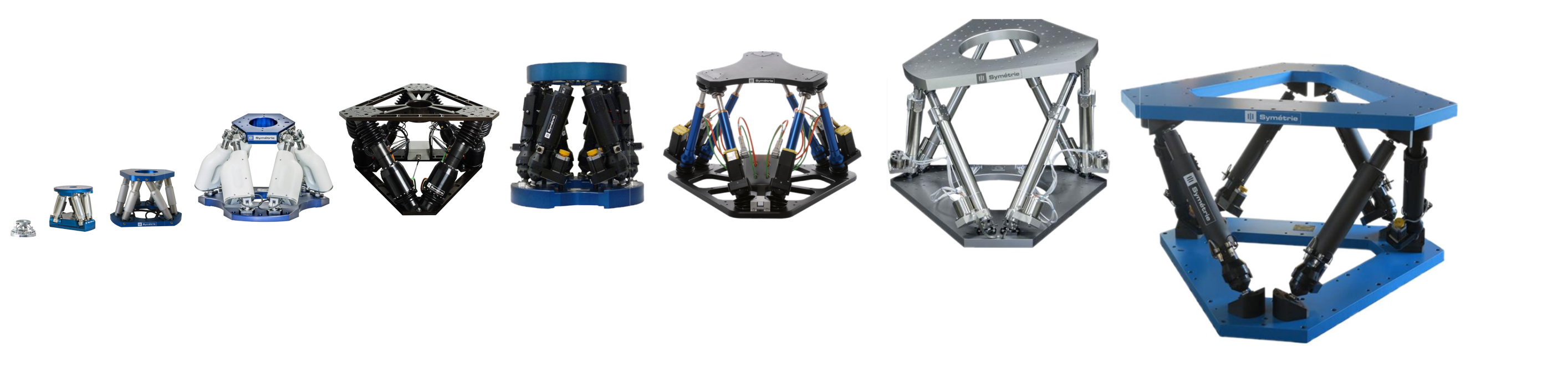
高精度六轴并联定位系统
Positioning hexapods
| 行程Tx,Ty/Tz(mm) | 行程Rx,Ry/Rz(deg) | 重复精度Tx,Ty/Tz(μm) | 重复精度Rx,Ry/Rz(μrad) | 负载(kg) | 运动台面(mm) | ||
| MAUKA | ±5/±10 | ±8/±8 | ±0.5 | ±5 | 5 | Ø90 | |
| SOLANO | ±18/±6.5 | ±10/±21 | ±0.25 | ±4 | 5/2.5 | Ø100 | |
| BORA | ±20/±10 | ±10/±15 | ±0.4/±0.3.2 | ±3.2/±3.2 | 10/5 | Φ160 | |
| PUNA | ±30/±20 | ±11/±20 | ±0.75/±0.75 | ±3.25/±3.25 | 25/10 | Φ250 | |
| BREVA | ±75/±50 | ±20/±22 | ±0.5/±0.5 | ±2.5/±2.5 | 200/80 | Φ289 | |
| SIRIUS | ±150/±100 | ±20/±20 | ±3/±2 | ±10/±17.5 | 200/80 | Φ520 | |
| ZONDA | ±200/±150 | ±20/±20 | ±0.25/±0.25 | ±1/±1 | 400/140 | Φ720 | |
| ZONDA S | ±50/±25 | ±10/±20 | ±0.25/±0.25 | ±2.5/±2.5 | 400/140 | Φ320 | |
| KUBAN | ±25/±25 | ±2/±3 | ±0.5/±0.25 | ±2.5/±4 | 500 | Φ600 | |
| SURES | ±8/±6 | ±1/±1 | ±0.5/±0.13 | ±0.5/±0.5 | 最大500 | Φ690 | |
| JORAN BJ | ±75/±50 | ±5/±8 | ±0.25/±0.25 | ±1/±1 | 1500 | Φ1300 | |
| JORAN UJ | ±170/±100 | ±10/±18 | ±0.25/±0.25 | ±1/±1 | 1500 | Φ1300 | |
| SONORA | ±75/±50 | ±6/±6 | ±50/±50 | ±90/±90 | max.17t | -- |
特殊应用——无磁六轴并联定位系统
Non magnetic hexaglide

| 型号 | 特点 | 行程 | 负载(kg) |
| 无磁六轴并联定位台 | 无磁,可用于2T强磁场 | ±10mm/±4° | 80 |
高精度六自由度运动模拟器
Motion hexapods

| 行程Tx,Ty/Tz(mm) | 行程Rx,Ry/Rz(deg) | 速度Tx,Ty/Tz(mm/s) | 速度Rx,Ry/Rz(°/s) | 加速度Tx,Ty/Tz(mm/s^2) | 加速度Rx,Ry/Rz(°/s^2) | 负载(kg)(垂直/水平) | |
| HEGOA | ±100/±50 | ±23/±30 | ±200/±120 | ±50/±50 | ±800/±800 | ±200/±200 | 50/15 |
| NOTUS | ±250/±200 | ±25/±30 | 800/300 | 50/50 | 10000/6000 | 500/500 | 200 |
| NOTUS V | ±250/±200 | ±25/±30 | 1200/600 | 100/100 | 10000/10000 | 1000/1000 | 100 |
| MISTRAL 800 | ±460/±400 | ±30/±40 | 1000/600 | 50/70 | 5000/6000 | 500/700 | 1000 |
| MISTRAL 800 | ±460/±400 | ±30/±40 | 1200/1000 | 100/140 | 8000/8000 | 800/1100 | 500 |
| MISTRAL 600 | ±400/±300 | ±30/±40 | 1000/600 | 50/70 | 5000/6000 | 500/700 | 1000 |
| MISTRAL 600 | ±400/±300 | ±30/±40 | 1200/1000 | 100/140 | 8000/8000 | 800/1100 | 500 |
| SIROCCO | ±600/±500 | ±40/±40 | 2000/1800 | 200/100 | 6000/6000 | 1200/600 | 2000 |
| AQUILON | ±800/±650 | ±40/±40 | 1800/1600 | 200/100 | 7000/7000 | 1200/600 | 2000 |
| AQUILON | ±600/±650 | ±28/±28 | 2000/1800 | 200/100 | 6000/6000 | 1200/600 | 2000 |
高精度六自由度控制器
Hexapods controller



| 型号 | 重量 | 电源 | 驱动单元 | 编码器输入 | |
| CAPELLA | ~5kg | 110-240VAC/50-60Hz | Micronix陶瓷电机驱动 | 增量差分信号(RS-422) | Controller for NANOPOS |
| VEGA | 小于75kg(110-240VAC电源型)<100kg(400VAC电源型) | 110-240VAC或400VAC(3相交流电3P+N+E)50-60Hz | 无刷电机 | 绝对编码器高速串口(Endat或BISS) | Controller for SIRIUS |
| ALPHA | ~10kg | 110-240VAC/50-60Hz | 直流电机,无刷直流电机或步进电机 | 增量差分信号(RS-422)或绝对编码器高速串口(Endat或BISS) | Universal Hexapod Controller |