GS






特征:
- 采用大理石基底结构
- 所有零部件根据系统特性做单独优化,实现超高系统精度
- XY轴采用直线电机驱动,Z轴采用伺服电机
- Z轴行程可选
- 横梁采用特殊高刚度设计
- 微增量测量系统
可选项:
- 绝对测量系统
- 采用铟钢或者微晶玻璃测量系统方式
- 采用空气轴承实现高精度需求
- 不锈钢框架可选\控制器可选
- X轴运动可集成至XY平台或者横梁上
- 可增加附加Z轴
主要参数
| 型号 | GS-600 | GS-1000 | ||
| X-Axis | Y-Axis | X-Axis | Y-Axis | |
| 行程(mm) | 600 | 600 | 1 | 1 |
| 最大速度(m/s) | 1 | |||
| 最大加速度(m/s2) | 10 | |||
| 最大负载(kg) | 25 | |||
| 自重(kg) | 1.65 | |||
| 电机参数 | ||||
| 峰值推力(N) | 300 | 2x270 | 800 | 2x1.000 |
| 持续推力(N) | 87 | 2x210 | 400 | 2x500 |
| 峰值电流(A) | 8.3 | 2x10.5 | 10 | 2x10.4 |
| 持续电流(A) | 2.4 | 2x3.1 | 4.5 | 2x4.7 |
| 温度传感器 | Yes | |||
| 霍尔传感器 | Available optionally | |||
| 最大可允许温度(℃) | 110 | |||
| 测量系统 | ||||
| 范围(μm) | 20 | |||
| 输出信号(Vpp) | 1 | |||
| 精度 | ||||
| 导向精度(水平、垂直μm) | 3 | 3 | 3 | 3 |
| 重复精度(μm) | 0.2 | 0.2 | 0.2 | 0.2 |
| 摆角误差(pich)(μrad) | 40 | 40 | 40 | 40 |
| 摆角误差(roll)(μrad) | 10 | 10 | 10 | 10 |
| 摆角误差(yaw) (μrad) | 20 | 20 | 20 | 20 |
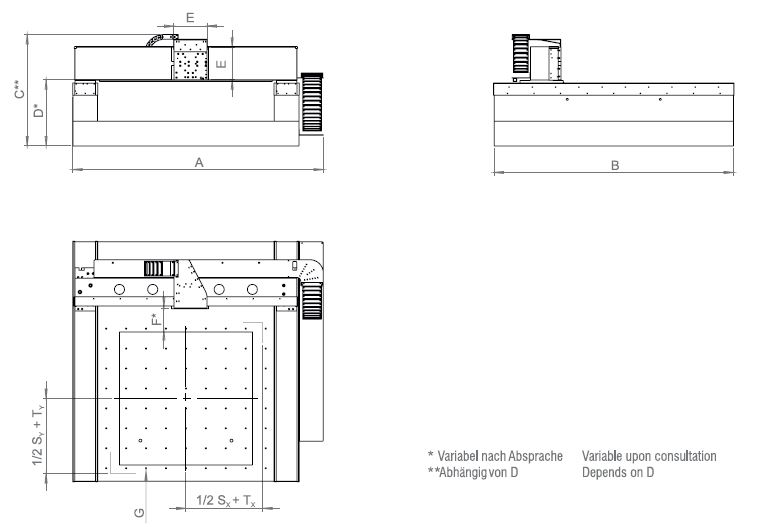
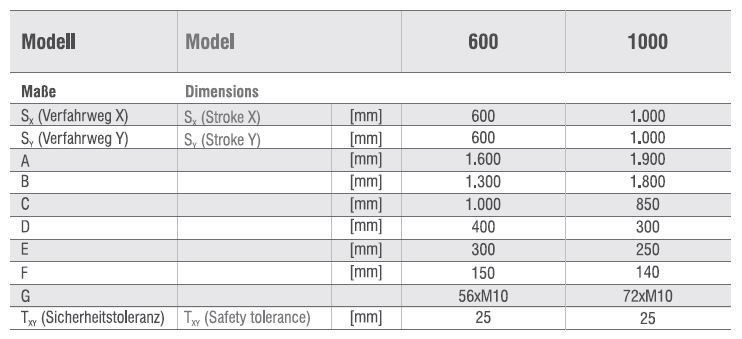
尺寸图